In the year 2035, the field of robotics has reached a remarkable milestone with the advent of biohybrid robotics. This innovative technology merges the principles of biology with mechanical engineering to create robots that mimic the movements and functionalities of living organisms. One of the most fascinating aspects of biohybrid robotics is the use of living muscle tissue as actuators, which not only enhances the performance of robots but also improves their energy efficiency. This article explores the energy efficiency models of living muscle tissue actuators in the context of biohybrid robotics.
The Concept of Living Muscle Tissue Actuators

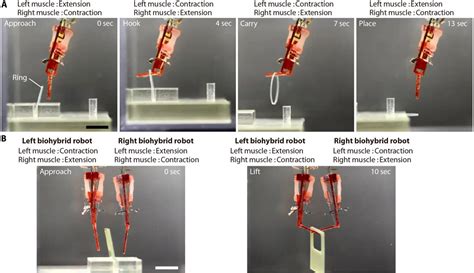
Living muscle tissue actuators are based on the idea of using biological muscle tissue to generate motion in robots. These actuators are designed to mimic the characteristics of natural muscles, such as their ability to contract and relax, and their adaptability to various forces and loads. By integrating living muscle tissue into robotic systems, we can achieve a more natural and efficient movement pattern.
The Energy Efficiency of Living Muscle Tissue Actuators
One of the primary advantages of living muscle tissue actuators is their high energy efficiency. Unlike traditional robotic actuators, which often rely on complex mechanical systems and high-power sources, living muscle tissue actuators can perform tasks with minimal energy consumption. This is due to several factors:
1. Natural Adaptability: Living muscle tissue can adapt to different forces and loads, allowing for more efficient energy utilization. This adaptability reduces the need for complex control systems and energy-intensive feedback mechanisms.
2. Metabolic Processes: Living muscle tissue generates energy through metabolic processes, which are inherently more efficient than the electrical or chemical energy used in traditional actuators. This metabolic energy conversion process results in lower energy consumption and reduced heat generation.
3. Muscle Tissue Properties: The physical properties of muscle tissue, such as its ability to store and release energy, contribute to the overall energy efficiency of living muscle tissue actuators. These properties enable the actuators to perform tasks with minimal energy loss.
Energy Efficiency Models
To further understand and optimize the energy efficiency of living muscle tissue actuators, researchers have developed various models. These models help in predicting the energy consumption of the actuators under different operating conditions and can be used to design more efficient biohybrid robotic systems. Some of the key energy efficiency models include:
1. Muscle Fiber Model: This model focuses on the individual muscle fibers and their energy consumption. It takes into account factors such as fiber length, diameter, and the number of fibers present in the tissue.
2. Muscle Tissue Model: This model considers the collective behavior of muscle tissue, including the interaction between fibers and the overall energy consumption of the tissue. It helps in understanding how different muscle tissue configurations affect energy efficiency.
3. Actuator Model: This model focuses on the energy consumption of the entire actuator, including the muscle tissue, control systems, and other components. It provides insights into the overall energy efficiency of the actuator and helps in identifying potential areas for improvement.
Applications of Living Muscle Tissue Actuators
The energy efficiency of living muscle tissue actuators has numerous applications in various fields, including:
1. Prosthetics: Biohybrid robotics can revolutionize the field of prosthetics by creating more natural and energy-efficient prosthetic limbs.
2. Healthcare: Living muscle tissue actuators can be used in medical devices, such as robotic surgical systems, to improve patient outcomes and reduce energy consumption.
3. Environmental Monitoring: Robots equipped with living muscle tissue actuators can be deployed for environmental monitoring tasks, such as water quality assessment and air pollution detection, with minimal energy consumption.
Conclusion
In the year 2035, biohybrid robotics has made significant strides in integrating living muscle tissue actuators. These actuators offer high energy efficiency, thanks to their natural adaptability, metabolic processes, and muscle tissue properties. By utilizing energy efficiency models, researchers can further optimize these actuators for various applications. As the field of biohybrid robotics continues to evolve, we can expect to see more innovative and energy-efficient robotic systems that mimic the functionalities of living organisms.